
The Forrester Wave™: Big Data Fabric, Q2 2018
Kscope18: It’s a Wrap!
As announced few weeks back I represented Rittman Mead at ODTUG's Kscope18 hosted in the magnificent Walt Disney World Dolphin Resort. It's always hard to be credible when telling people you are going to Disneyworld for work but Kscope is a must-go event if you are in the Oracle landscape.

In the Sunday symposium Oracle PMs share hints about the products latest capabilities and roadmaps, then three full days of presentations spanning from the traditional Database, EPM and BI tracks to the new entries like Blockchain. On top of this the opportunity to be introduced to a network of Oracle experts including Oracle ACEs and Directors, PMs and people willing to share their experience with Oracle (and other) tools.
Sunday Symposium and Presentations
I attended the Oracle Analytics (BI and Essbase) Sunday Symposium run by Gabby Rubin and Matt Milella from Oracle. It was interesting to see the OAC product enhancements and roadmap as well as the feature catch-up in the latest release of OBIEE on-premises (version 12.2.1.4.0).
As expected, most of the push is towards OAC (Oracle Analytics Cloud): all new features will be developed there and eventually (but assurance on this) ported in the on-premises version. This makes a lot of sense from Oracle's point of view since it gives them the ability to produce new features quickly since they need to be tested only against a single set of HW/SW rather than the multitude they are supporting on-premises.
Most of the enhancements are expected in the Mode 2/Self Service BI area covered by Oracle Analytics Cloud Standard since a) this is the overall trend of the BI industry b) the features requested by traditional dashboard style reporting are well covered by OBIEE.
The following are just few of the items you could expect in future versions:
- Recommendations during the data preparation phase like GeoLocation and Date enrichments
- Data Flow enhancements like incremental updates or parametrized data-flows
- New Visualizations and in general more control over the settings of the single charts.
In general Oracle's idea is to provide a single tool that meets both the needs of Mode 1 and Mode 2 Analytics (Self Service vs Centralized) rather than focusing on solving one need at a time like other vendors do.
Special mention to the Oracle Autonomous Analytics Cloud, released few weeks ago, that differs from traditional OAC for the fact that backups, patching and service monitoring are now managed automatically by Oracle thus releasing the customer from those tasks.
During the main conference days (mon-wed) I assisted a lot of very insightful presentations and the Oracle ACE Briefing which gave me ideas for future blog posts, so stay tuned! As written previously I had two sessions accepted for Kscope18: "Visualizing Streams" and "DevOps and OBIEE: Do it Before it's too late", in the following paragraph I'll share details (and link to the slides) of both.
Visualizing Streams
One of the latest trends in the data and analytics space is the transition from the old style batch based reporting systems which by design were adding a delay between the event creation and the appearance in the reporting to the concept of streaming: ingesting and delivering event information and analytics as soon as the event is created.
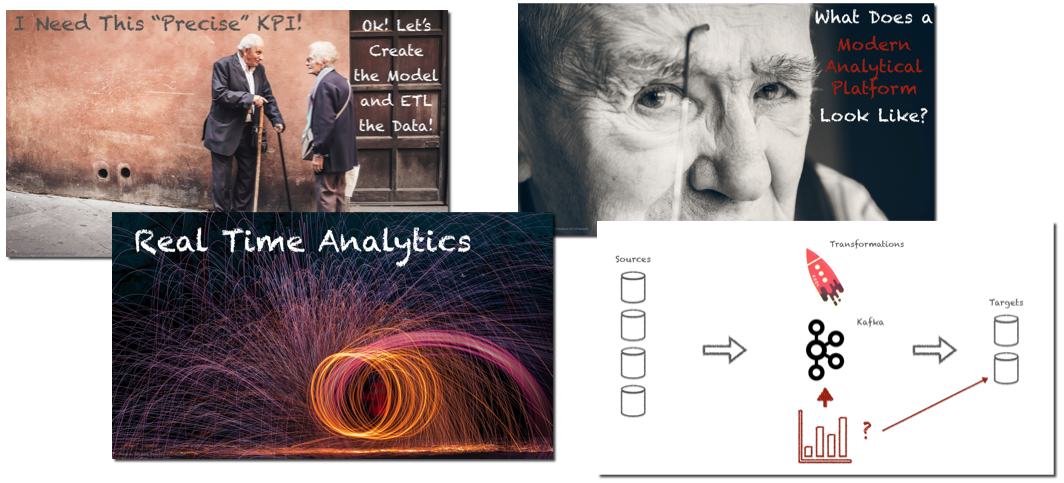
The session explains how the analytics space changed in recent times providing details on how to setup a modern analytical platform which includes streaming technologies like Apache Kafka, SQL based enrichment tools like Confluent's KSQL and connections to Self Service BI tools like Oracle's Data Visualization via sql-on-Hadoop technologies like Apache Drill. The slides of the session are available here.
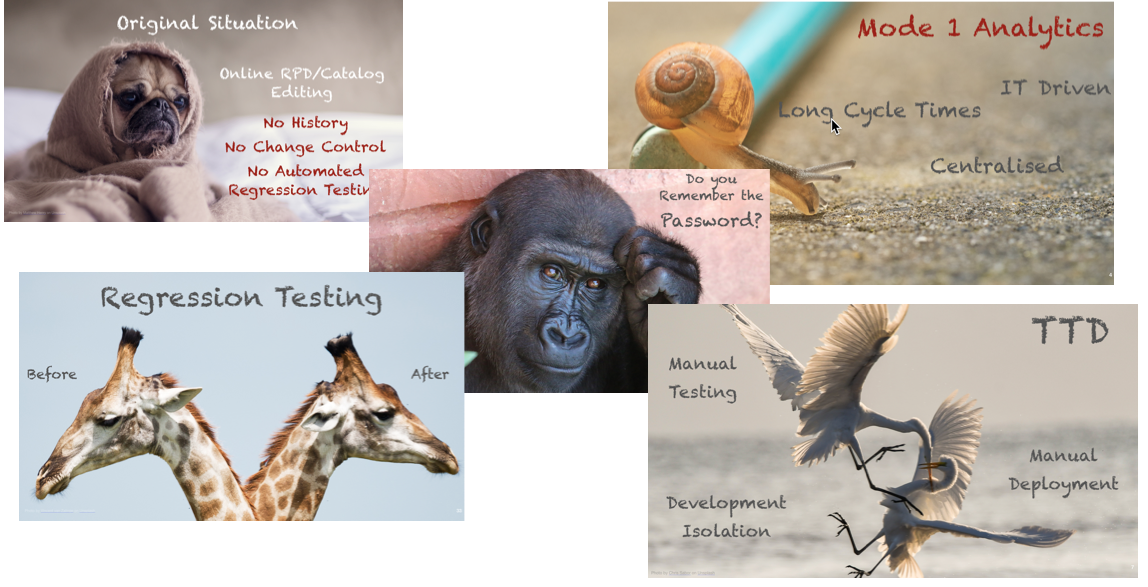
DevOps and OBIEE: Do it Before it's Too Late
In the second session, slides here, I've been initially going through the motivations of applying DevOps principles to OBIEE: the self service BI wave started as a response to the long time to delivery associated with the old school centralized reporting projects. Huge monolithic sets of requirements to be delivered, no easy way to provide development isolation, manual testing and code promotion were only few of the stoppers for a fast delivery.
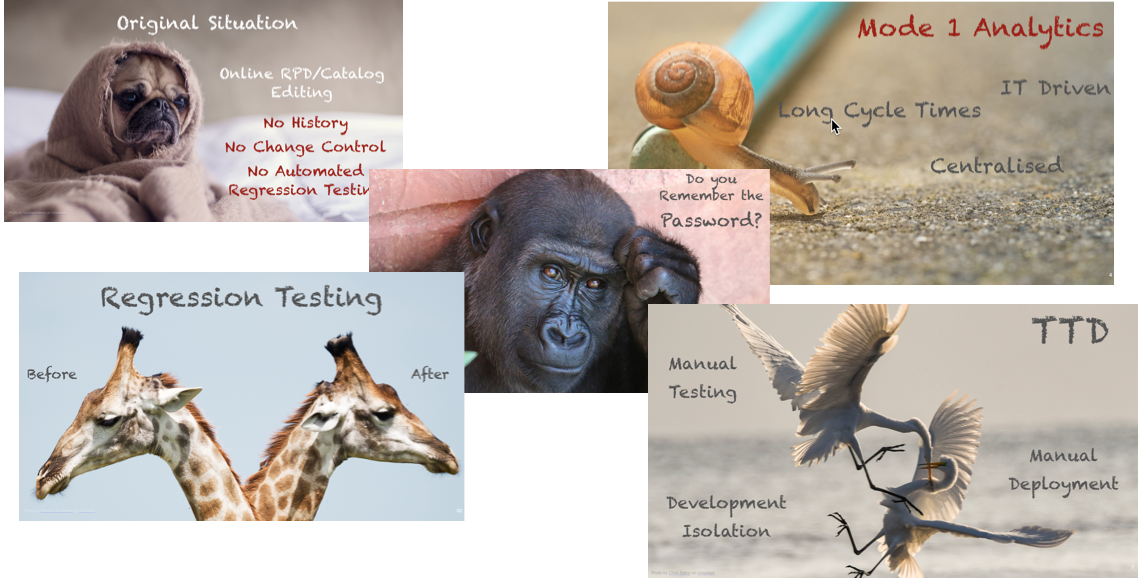
After an initial analysis of the default OBIEE developments methods, the presentation explains how to apply DevOps principles to an OBIEE (or OAC) environment and precisely:
- Code versioning techniques
- Feature-driven environment creation
- Automated promotion
- Automated regression testing
Providing details on how the Rittman Mead BI Developer Toolkit, partially described here, can act as an accelerator for the adoption of these practices in any custom OBIEE implementation and delivery process.
As mentioned before, the overall Kscope experience is great: plenty of technical presentation, roadmap information, networking opportunities and also much fun! Looking forward to Kscope19 in Seattle!
Kscope18: It’s a Wrap!
As announced few weeks back I represented Rittman Mead at ODTUG's Kscope18 hosted in the magnificent Walt Disney World Dolphin Resort. It's always hard to be credible when telling people you are going to Disneyworld for work but Kscope is a must-go event if you are in the Oracle landscape.
In the Sunday symposium Oracle PMs share hints about the products latest capabilities and roadmaps, then three full days of presentations spanning from the traditional Database, EPM and BI tracks to the new entries like Blockchain. On top of this the opportunity to be introduced to a network of Oracle experts including Oracle ACEs and Directors, PMs and people willing to share their experience with Oracle (and other) tools.
Sunday Symposium and Presentations
I attended the Oracle Analytics (BI and Essbase) Sunday Symposium run by Gabby Rubin and Matt Milella from Oracle. It was interesting to see the OAC product enhancements and roadmap as well as the feature catch-up in the latest release of OBIEE on-premises (version 12.2.1.4.0).
As expected, most of the push is towards OAC (Oracle Analytics Cloud): all new features will be developed there and eventually (but assurance on this) ported in the on-premises version. This makes a lot of sense from Oracle's point of view since it gives them the ability to produce new features quickly since they need to be tested only against a single set of HW/SW rather than the multitude they are supporting on-premises.
Most of the enhancements are expected in the Mode 2/Self Service BI area covered by Oracle Analytics Cloud Standard since a) this is the overall trend of the BI industry b) the features requested by traditional dashboard style reporting are well covered by OBIEE.
The following are just few of the items you could expect in future versions:
- Recommendations during the data preparation phase like GeoLocation and Date enrichments
- Data Flow enhancements like incremental updates or parametrized data-flows
- New Visualizations and in general more control over the settings of the single charts.
In general Oracle's idea is to provide a single tool that meets both the needs of Mode 1 and Mode 2 Analytics (Self Service vs Centralized) rather than focusing on solving one need at a time like other vendors do.
Special mention to the Oracle Autonomous Analytics Cloud, released few weeks ago, that differs from traditional OAC for the fact that backups, patching and service monitoring are now managed automatically by Oracle thus releasing the customer from those tasks.
During the main conference days (mon-wed) I assisted a lot of very insightful presentations and the Oracle ACE Briefing which gave me ideas for future blog posts, so stay tuned! As written previously I had two sessions accepted for Kscope18: "Visualizing Streams" and "DevOps and OBIEE: Do it Before it's too late", in the following paragraph I'll share details (and link to the slides) of both.
Visualizing Streams
One of the latest trends in the data and analytics space is the transition from the old style batch based reporting systems which by design were adding a delay between the event creation and the appearance in the reporting to the concept of streaming: ingesting and delivering event information and analytics as soon as the event is created.
The session explains how the analytics space changed in recent times providing details on how to setup a modern analytical platform which includes streaming technologies like Apache Kafka, SQL based enrichment tools like Confluent's KSQL and connections to Self Service BI tools like Oracle's Data Visualization via sql-on-Hadoop technologies like Apache Drill. The slides of the session are available here.
DevOps and OBIEE: Do it Before it's Too Late
In the second session, slides here, I've been initially going through the motivations of applying DevOps principles to OBIEE: the self service BI wave started as a response to the long time to delivery associated with the old school centralized reporting projects. Huge monolithic sets of requirements to be delivered, no easy way to provide development isolation, manual testing and code promotion were only few of the stoppers for a fast delivery.
After an initial analysis of the default OBIEE developments methods, the presentation explains how to apply DevOps principles to an OBIEE (or OAC) environment and precisely:
- Code versioning techniques
- Feature-driven environment creation
- Automated promotion
- Automated regression testing
Providing details on how the Rittman Mead BI Developer Toolkit, partially described here, can act as an accelerator for the adoption of these practices in any custom OBIEE implementation and delivery process.
As mentioned before, the overall Kscope experience is great: plenty of technical presentation, roadmap information, networking opportunities and also much fun! Looking forward to Kscope19 in Seattle!
Patch Set Update: Oracle Smart View for Office 11.1.2.5.800
Hyperion Product Management recently advised the release of a Patch Set Update (PSU) for Oracle Smart View for Office 11.1.2.5.x
Patch Set Update: 11.1.2.5.800 Oracle Smart View for Office Patch 28150001
This PSU download is available from the My Oracle Support | Patches & Updates section.
This patch provides the Smart View help files that can be installed on a user's local drive or on a web server in your organization.
- Note that in the zip file, the help for English and non-localized languages is release 11.1.2.5.800. The help for localized languages is release 11.1.2.5.720.
- The localized languages are Brazilian Portuguese, Dutch, French, German, Italian, Japanese, Korean, Spanish, Simplified Chinese, and Traditional Chinese.
Refer to the Readme files for information pertaining to the above requirements. The Readme file should also be consulted prior proceeding with the PSU implementation. This document contains important information that includes supported paths, implementing and configuration steps, list of new features and defects fixed, along with additional support information.
It is important to ensure that the requirements and support paths to this patch are met as outlined within the Readme file.
The Readme file is available from the Patches & Updates download screen.
More Information:- Available Patch Sets and Patch Set Updates for Oracle Hyperion Smart View for Office (Doc ID 2220997.1)
- Smart View Support Matrix and Compatibility FAQ (Doc ID 1923582.1)
ChitChat for OBIEE – Now Available as Open Source!
ChitChat is the Rittman Mead commentary tool for OBIEE. ChitChat enhances the BI experience by bridging conversational capabilities into the BI dashboard, increasing ease-of-use and seamlessly joining current workflows. From tracking the history behind analytical results to commenting on specific reports, ChitChat provides a multi-tiered platform built into the BI dashboard that creates a more collaborative and dynamic environment for discussion.
Today we're pleased to announce the release into open-source of ChitChat! You can find the github repository here: https://github.com/RittmanMead/ChitChat
Highlights of the features that ChitChat provides includes:
-
Annotate - ChitChat's multi-tiered annotation capabilities allow BI users to leave comments where they belong, at the source of the conversation inside the BI ecosystem.
-
Document - ChitChat introduces the ability to include documentation inside your BI environment for when you need more that a comment. Keeping key materials contained inside the dashboard gives the right people access to key information without searching.
-
Share - ChitChat allows to bring attention to important information on the dashboard using the channel or workflow manager you prefer.
-
Verified Compatibility - ChitChat has been tested against popular browsers, operating systems, and database platforms for maximum compatibility.
Getting Started
In order to use ChitChat you will need OBIEE 11.1.1.7.x, 11.1.1.9.x or 12.2.1.x.
First, download the application and unzip it to a convenient access location in the OBIEE server, such as a home directory or the desktop.
See the Installation Guide for full detail on how to install ChitChat.
Database Setup
Build the required database tables using the installer:
cd /home/federico/ChitChatInstaller
java -jar SocializeInstaller.jar -Method:BuildDatabase -DatabasePath:/app/oracle/oradata/ORCLDB/ORCLPDB1/ -JDBC:"jdbc:oracle:thin:@192.168.0.2:1521/ORCLPDB1" -DatabaseUser:"sys as sysdba" -DatabasePassword:password -NewDBUserPassword:password1
The installer will create a new user (RMREP), and tables required for the application to operate correctly. -DatabasePath flag tells the installer where to place the datafiles for ChitChat in your database server. -JDBC indicates what JDBC driver to use, followed by a colon and the JDBC string to connect to your database. -DatabaseUser specifies the user to access the database with. -DatabasePassword specifies the password for the user previously given. -NewDBUserPassword indicates the password for the new user (RMREP) being created.
WebLogic Data Source Setup
Add a Data Source object to WebLogic using WLST:
cd /home/federico/ChitChatInstaller/jndiInstaller
$ORACLE_HOME/oracle_common/common/bin/wlst.sh ./create-ds.py
To use this script, modify the ds.properties file using the method of your choice. The following parameters must be updated to reflect your installation: domain.name, admin.url, admin.userName, admin.password, datasource.target, datasource.url and datasource.password.
Deploying the Application on WebLogic
Deploy the application to WebLogic using WLST:
cd /home/federico/ChitChatInstaller
$ORACLE_HOME/oracle_common/common/bin/wlst.sh ./deploySocialize.py
To use this script, modify the deploySocialize.py file using the method of your choice. The first line must be updated with username, password and url to connect to your Weblogic Server instance. The second parameter in deploy command must be updated to reflect your ChitChat access location.
Configuring the Application
ChitChat requires several several configuration parameters to allow the application to operate successfully. To change the configuration, you must log in to the database schema as the RMREP user, and update the values manually into the APPLICATION_CONSTANT table.
See the Installation Guide for full detail on the available configuration and integration options.
Enabling the Application
To use ChitChat, you must add a small block of code on any given dashboard (in a new column on the right-side of the dashboard) where you want to have the application enabled:
<rm id="socializePageParams"
user="@{biServer.variables['NQ_SESSION.USER']}"
tab="@{dashboard.currentPage.name}"
page="@{dashboard.name}">
</rm>
<script src="/Socialize/js/dashboard.js"></script>
Congratulations! You have successfully installed the Rittman Mead commentary tool. To use the application to its fullest capabilities, please refer to the User Guide.
Problems?
Please raise any issues on the github issue tracker. This is open source, so bear in mind that it's no-one's "job" to maintain the code - it's open to the community to use, benefit from, and maintain.
If you'd like specific help with an implementation, Rittman Mead would be delighted to assist - please do get in touch with Jon Mead or DM us on Twitter @rittmanmead to get access to our Slack channel for support about ChitChat.
Please contact us on the same channels to request a demo.

